
ミニチュア超音波モータの開発
素形材開発部 小松 和三
研究背景
近年,センサやマイコンなどの電子部品の小型化により,電子機器の小型化・高性能化が実現されています.また,このような機器には様々なアクチュエータが搭載されているものが多くなっています.しかしながら,これらに使用されるアクチュエータの小型化があまり進んでいないのが現状です.そこで,さらなる機器の小型化・高性能化を目指すためには,アクチュエータの小型化が必要不可欠となっています.
小型のアクチュエータの一例として,多く利用されている電磁型アクチュエータがありますが,電磁型アクチュエータは駆動電圧が比較的高くなってしまうことや多くの部品から構成されるため,さらなる機器の小型化にはあまり向いていません.一方,超音波モータは,圧電素子による超音波領域の機械的振動を駆動源とし,ステータをロータやスライダと接触させて物体を回転動作,または直動動作をさせる摩擦駆動型のアクチュエータです.この超音波モータは,電磁型モータと比較すると,少ない部品で構成され,小型化が可能で,高速応答,高分解能,高トルク,電圧無印加時に自己保持トルクを有するなどの特徴があり,カメラのオートフォーカス機構や,医療現場におけるMRI下で使用する機器などに応用されています.
現在,様々な駆動原理を使った超音波モータが開発されていますが,多くの場合は複数の圧電素子を用いることで,物体を双方向に駆動させています.さらに,予圧調整機構を必要とするため,超音波モータのサイズが大きくなり,限られた空間へのモータの設置が困難などの問題があります.
超音波モータについて
超音波モータには,進行波型モータや定在波型モータなど,様々な構造のものがありますが,物体を多次元方向に動かす場合や狭小空間内の用途に対しては定在波型モータが適しています.しかし,定在波型モータは物体を双方向に駆動するためには,圧電素子を2つ以上配置しなければならず,その結果,モータが大きくなり,限られた空間に配置できないなどの問題が発生します.
開発した超音波モータ
|
|
|
図1 超音波モータの構成 |
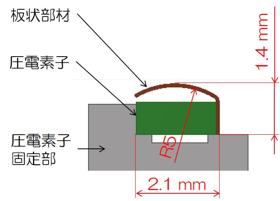
研究では,圧電素子を1つのみを用いて,同一のモータによる回転・直動駆動を可能とし,さらに双方向駆動を実現する汎用性の高い小型の超音波モータを開発しました.図1に開発した超音波モータの構成を示します.本超音波モータは圧電素子固定部,圧電素子,板状部材から構成され,小型に製作することが可能で,2.1×1.4×1.0 mmのサイズです.
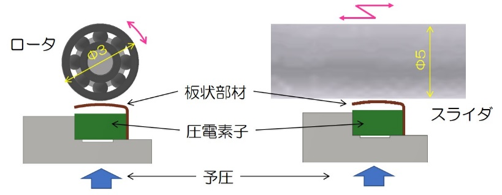
次に,回転駆動と直動駆動の構成を図2に示します.駆動方法は,板状部材を物体へ押し付け,振動の往復動速度を変えることにより物体を双方向に駆動させることが可能です.本超音波モータの駆動電圧波形にはノコギリ波を用い,圧電素子の伸びと縮みの時間に差をつけることにより,摩擦と慣性によって駆動します.
|
|
|
(a)回転駆動 (b)直動駆動 図2 超音波モータ駆動方法 |
今後の予定
本研究では同一の超音波モータにより,回転駆動と直動駆動を実現することができ,同時に双方向駆動が可能な超音波モータを研究開発することができました.この研究成果を利用可能な応用展開先の調査と,開発した超音波モータのさらなる性能向上を目指していきます.
