
| 名称等 | 双腕型協働ロボット | 設備分類 | メカトロニクス技術 |
|---|---|---|---|
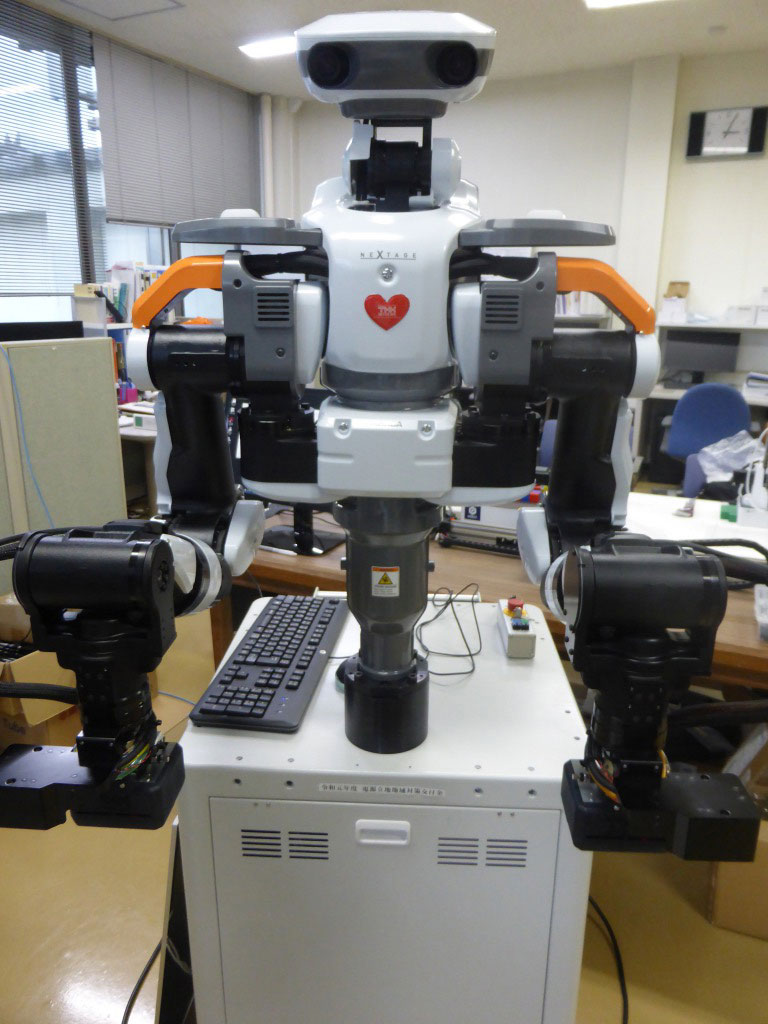
| 製造元 | (株)川田工業 | 仕様・品質等 | Nextage |
| 用途等 | 本設備は、柵等で人間と隔離せずに使用可能であり、人の作業をそのまま代替えすることを目的としたロボットである。また、4台のカメラによる画像処理技術および6軸のアームを2つ有し、人の様々な作業に対応可能である。なお、従来の双腕型協働ロボットと比較し可搬重量と動作スピードが約2倍となっており、より作業の効率化が図れるようになった。 | ||
| 詳細仕様 | ・アーム構成:双腕6軸×2 ・動作範囲:625mm ・可搬重量:片腕で2.5kg ・繰り返し精度:±0.03mm ・カメラ:4台 ・協働型:JIS B8433-1:2015に適合 ・寸法:580×580mm |
使用料 | 810(円/時間) | 導入年度 | R1年度 |
| 設置場所 | 本館 A棟2F:情報・電子研究室Ⅱ | 主担当者名 | 高橋 朗人 |
