
先進プロセス開発部 伊藤 亮、小松 和三、加藤 勝
働き方改革に貢献する協働ロボット
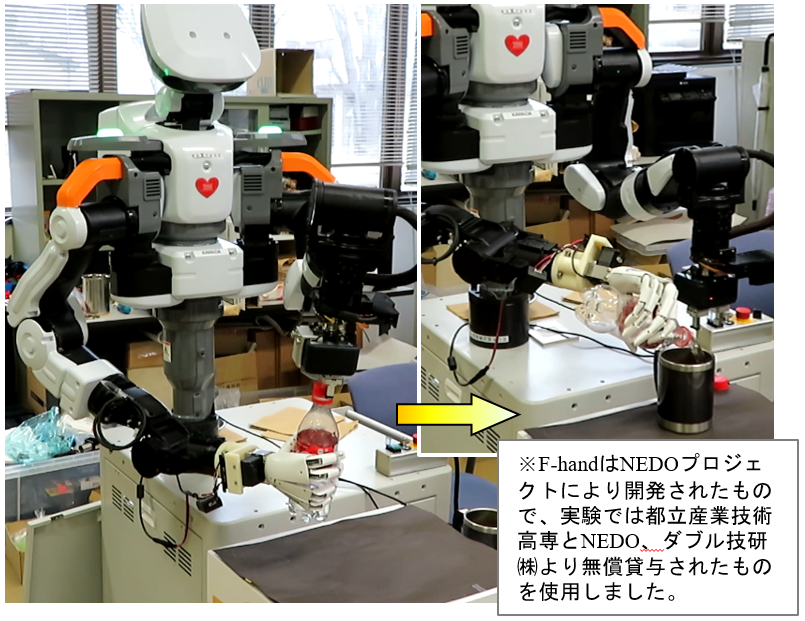
図1 協働型のロボット
秋田県では、若者に魅力ある雇用の拡大に向けて、効率化・生産コスト削減のためだけでなく、働き方改革に対応するためのロボティクス技術の活用が急務となっています。従来の産業用ロボットが安全柵で囲い人間と隔離されているのに対し、近年注目されているのは、他の作業者の傍で運用可能な「協働型のロボット」です。我々もこのようなロボットを用いて、現状手作業で行われている作業を代替することを考慮し、ワーク(部品などの把持対象物)のハンドリング技術の開発に取組んでいます。図1は例として人の手を模した5指ロボットハンド「F-hand*」を用いてペットボトルの蓋を開け中身をコップに注ぐ動作を行わせた様子です。

図2 様々なワークの把持および吸着パッド
把持が困難なワークとしては食品や農作物などの不定形で柔軟なものが挙げられますが、このようなワークを図2に示すような様々な方法で把持する試験を実施し最適な方法を模索していきます。なお現在は独自のロボットハンドの製作にも取組んでおり、県内企業のニーズに適合したハンドの開発を目指しています。
ロボットハンドにも適応可能な超音波モータの開発
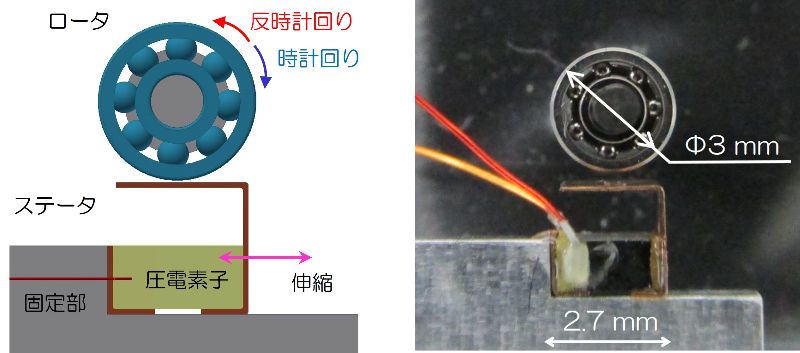
図3 超音波モータの模式図と試作したモータ
超音波モータ(図3)は、圧電素子で発生する超音波領域の振動を、ステータとの接触摩擦で物体に伝達して駆動するアクチュエータです。本モータの特徴は小型化に向く点であり、高度情報化社会における様々な小型機器内で用いられるアクチュエータとしてのニーズが期待されています。本研究では、板状部材と圧電素子を組み合わせた小型の汎用性の高い超音波モータの開発に取組んでおり、今後ロボットハンドを含め様々な応用を検討していきます。
ロボットの知能となるAIによる画像検査技術
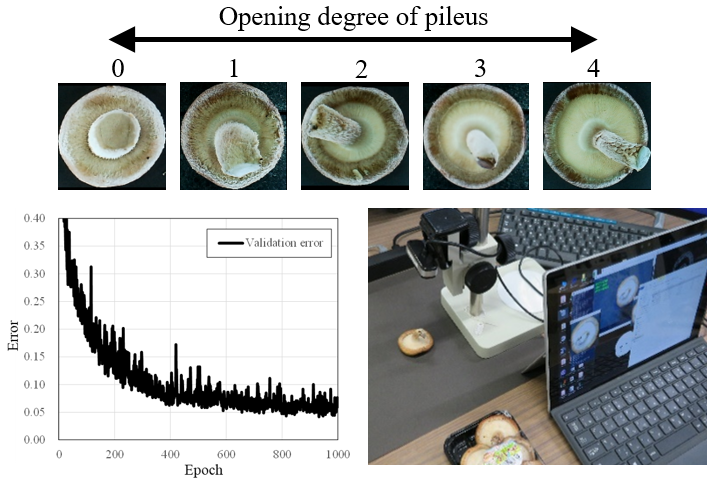
図4 ディープラーニングを用いた
シイタケの等級判別
自動化のニーズの中で、目視による検査工程や農作物の等級判別などを自動化した場合の効果が大きいと考えられ、これらの自動化に有用と考えられるAI技術を導入した自動検査技術の開発を行っています。図4は生シイタケの等級判別を試みた例で、生シイタケの傘の開き度合いを5段階で分類し学習させた結果約94%の判別精度を得ました。ここではVGG(2014年に提案された、畳み込み層とプーリング層から構成される基本的なニューラルネットワーク)をベースに、入出力のみ調整したものを作成し、ソニーのNeural Network Console を用いてディープラーニングを実施しました。学習用データとしては約4000枚の写真を用いています。今後は実用化に向け判別の速度を向上させるためさらにニューラルネットワークの改良を進めていきます。
伊藤(左)、小松(右)
